Open3D-ML 是 3D 机器学习任务 Open3D 的扩展。它建立在 Open3D 核心库之上,并使用机器学习工具扩展 3D 数据处理。Open3D-ML侧重于语义点云细分等应用,并提供可应用于常见任务的预培训模型以及用于训练 的管道。
Open3D-ML 与TensorFlow和PyTorch合作,轻松集成到现有项目中,还提供独立于 ML 框架(如数据可视化) 的一般功能。
1、安装
Open3D-ML 集成在Python版本的Open3D v0.11 中。要使用所有的机器学习功能,你需要安装 PyTorch 或 TensorFlow。Open3D v0.11 与以下版本兼容
- PyTorch 1.6
- TensorFlow 2.3
- CUDA 10.1 (可选)
如果你需要使用不同的版本,我们建议从源码构建 Open3D。
我们提供预制的 pip 包,用于Ubuntu 18.04+ 的 Open3D-ML+,可以使用如下命令安装:
1 | $ pip install open3d |
可以使用如下命令测试安装:
1 | # with PyTorch |
2、读取数据集
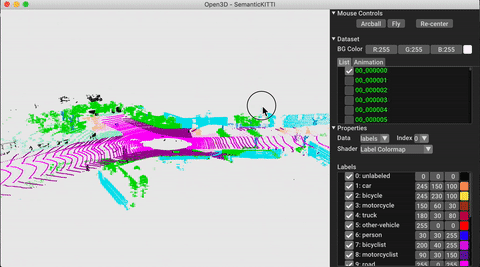
dataset命名空间包含了用于阅读常见数据集的类。在这里,我们阅读语义KITTI数据集并将其可视化。
1 | import open3d.ml.torch as ml3d # or open3d.ml.tf as ml3d |
3、运行预先训练的模型
在上一个示例的基础上,我们可以使用预先训练的语义分割模型对管道进行即时处理, 并在数据集的点云上运行。请参阅model zoo 获得预训练模型的权重。
1 | model = ml3d.models.RandLANet() |
4、训练模型
与推理类似,管道为在数据集上训练模型提供了接口。
1 | # use a cache for storing the results of the preprocessing (default path is './logs/cache') |
有关更多示例,请参阅examples 和scripts目录。
5、使用预定义的脚本
scripts/semseg.py为在 数据集中培训和评估模型提供了一个容易的接口。它减少了定义特定模型和 传递精确配置的麻烦。
1 | python scripts/semseg.py {tf/torch} -c <path-to-config> --<extra args> |
请注意,extra args的优先级高于配置文件中的相同参数。因此,在启动脚本时,你可以通过命令行 而不是在配置文件中更改参数。
例如:
1 | # Launch training for RandLANet on SemanticKITTI with torch. |
要获得进一步的帮助,请运行python scripts/semseg.py --help
6、存储库结构
Open3D-ML 的核心部分位于ml3d子目录中,该子目录集成到ml命名空间。除了核心部分外,exsamples和 scripts目录中还提供支持脚本,以便设置训练管道或在数据集商运行网络。
1 | ├─ docs # Markdown and rst files for documentation |
7、语义分割任务
对于语义分割的任务,我们使用所有类的平均交叉合并 (mIoU) 来衡量不同方法的性能。该表显示了 用于分割任务的可用模型和数据集以及相应的得分。每个分数都链接到相应的权重文件。
|Model / Dataset |SemanticKITTI |Toronto 3D |S3DIS| |—-|—|—|—| |RandLA-Net (tf) |53.7| 69.0| 67.0| |RandLA-Net (torch)| 52.8 |71.2| 67.0| |KPConv (tf) |58.7| 65.6| 65.0| |KPConv (torch)| 58.0| 65.6| 60.0|
8、Model Zoo
有关所有全重文件的完整列表,请参阅model_weights.txt 和 MD5 检查文件model_weights.md5。
9、预置数据集
以下是我们提供Reader的数据集列表:
- SemanticKITTI (project page)
- Toronto 3D (github)
- Semantic 3D (project-page)
- S3DIS (project-page)
- Paris-Lille 3D (project-page)
要下载这些数据集,请访问对应网页并查看scripts/download_datasets 中的脚本。